No products in the cart.
Remanence, coercivity, intrinsic coercivity, and maximum energy product are the four most common parameters used to evaluate the performance of magnetic materials. In addition to these, when dealing with finished magnets, we frequently encounter two other parameters: surface magnetism and magnetic flux (also known as magnetic flux linkage).
Simply put, surface magnetism refers to the magnetic induction strength at the surface of a magnet. It is defined as the magnetic flux passing through a unit area; consequently, it is also referred to as surface magnetic flux density. Its units are Gauss (Gs) or Tesla (T), and it is measured using a Gaussmeter or a testing instrument equipped with a Hall sensor.

Surface magnetism refers to the magnetic flux density value at a specific measurement point—or, more precisely, within a small localized measurement area. Since a magnet's magnetic field distribution is inherently variable, the surface magnetism values at different points typically differ. In applications that rely on spatial magnetic fields, the surface magnetism—or the magnetic flux density at a designated specific point—is frequently established as a critical technical requirement.
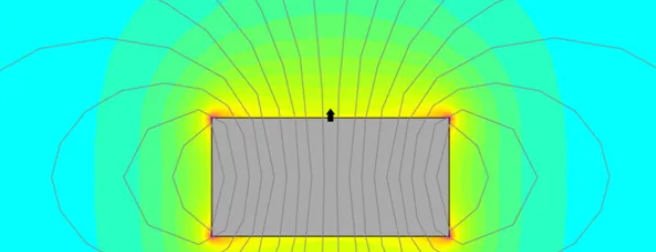
Surface magnetism is related to the magnet's height-to-diameter ratio (the ratio of the magnet's height to its diameter; here, the height—or thickness—is conventionally assumed to align with the direction of magnetization). The higher this ratio, the stronger the surface magnetism; conversely, the larger the surface area perpendicular to the direction of magnetization, the lower the surface magnetism. In other words, the greater the dimension along the direction of magnetization, the higher the surface magnetism. Furthermore, because different manufacturers utilize different Hall elements in their Gaussmeters, the surface magnetism readings obtained for the exact same magnet may exhibit slight variations.
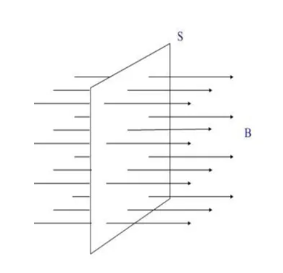
In physics, magnetic flux is defined as the quantity of magnetic field lines passing perpendicularly through a given surface area. Simply put, it is a physical quantity used to measure the overall magnitude of a magnet's magnetic properties. Its unit is the Weber (Wb), and it is denoted by the symbol Φ. The formula is Φ = B × S, where B represents the magnetic induction intensity (magnetic flux density) and S represents the surface area of the magnetic pole; this indicates that the magnitude of the magnetic flux is determined by both the surface area of the magnetic pole and the magnetic induction intensity.
The instrument used to measure magnetic flux is the fluxmeter. When paired with a Helmholtz coil, this setup allows for not only the measurement of magnetic flux but also the calculation of magnetic moment—a capability made possible because the measured flux value varies in accordance with the specific parameters of the fluxmeter and the Helmholtz coil. The relationship between magnetic flux and magnetic moment is analogous to the distinction between weight and mass: weight is influenced by the gravitational constant—meaning the same object will have different weights on Earth and Mars—whereas its mass remains constant. Similarly, due to the influence of coil turns, measurements of the magnetic flux from a single magnet may vary depending on the specific fluxmeter and coil used; however, the magnetic moment of that magnet will invariably remain the same.
When a magnet is in an open-circuit state, its magnetic moment can be calculated by converting the measured magnetic flux. This method allows for the determination of the actual residual induction value—denoted as Bdi (also known as intrinsic flux density)—corresponding to the magnet's operating point, according to the formula: Bdi = Φ×Coil Constant / Magnet Volume.

Remanence, surface flux density, and magnetic flux are three concepts that are frequently confused; let us clarify them here:
Remanence is an intrinsic property of a material. Provided that self-demagnetization does not occur, the remanence of a magnet remains constant; it is determined by the product's raw material composition and manufacturing process. Measurements of remanence are conducted under a completely closed-circuit condition.
Surface flux density refers to the magnetic induction value measured at a specific location (a small, localized area) on a magnet or magnetic assembly when it is in an open-circuit or semi-open-circuit state. Surface flux density is a directional vector; the values measured on different faces of a magnet can vary significantly. Typically, when we refer to surface flux density, we are citing the value measured perpendicular to the magnetic pole face. For a *single* magnet, the maximum surface flux density is theoretically half of its remanence. Note the emphasis on "single magnet": in certain magnetic assemblies and magnet arrays, specialized magnetic circuit designs can be employed to boost the surface flux density—values which may, in fact, exceed the remanence.
Magnetic flux represents the overall magnetic strength of a magnet, typically measured using a coil-based method. Generally, magnetic assemblies are not suitable for magnetic flux measurements. Magnetic flux is also inherently associated with a specific direction; however, in practical measurements, a three-dimensional Helmholtz coil can be utilized to determine the total magnetic flux value. Both surface flux density and magnetic flux measurements require particular attention to the specific direction of measurement.
**Extended Knowledge: Magnetic Circuits**
A magnetic circuit refers to an assembly—comprising one or more permanent magnets and ferromagnetic (flux-conducting) materials—arranged in a specific shape and configuration to generate a magnetic field within a designated working air gap. Within a magnetic circuit, ferromagnetic materials serve several functions: they guide the flow of magnetic flux, locally amplify the magnetic induction, prevent or minimize flux leakage, and enhance the overall mechanical strength of the assembly.
Typically, the magnetic state of a completely isolated, single magnet (one where no ferromagnetic materials or other permanent magnets alter the path of the magnetic circuit) is termed an "open-circuit state." A quintessential example involves placing a magnet on a platform devoid of any magnetic attraction, with no surrounding ferromagnetic materials or other magnets to exert influence; in this scenario, the magnet is considered to be in an open-circuit state.
Conversely, when a magnet's magnetic circuit path is entirely confined within an internal space—such that it exhibits no external magnetism—the magnet is considered to be in a "closed-circuit state." A classic example is a magnet undergoing the measurement of its demagnetization curve; during this process, it exhibits virtually no external magnetic field. With the exception of the open-circuit and closed-circuit states, all of the above can be classified as semi-open circuits.