No products in the cart.
Many applications of magnets leverage fundamental principles: the repulsion between like poles, the attraction between unlike poles, or the ability of magnets to attract ferromagnetic materials. Examples include various magnetic holding devices, magnetic coupling structures, magnetic separation equipment, and magnetic transmission systems.
In the context of magnetic holding applications, the magnetic attraction force—or "pull force"—is a parameter of paramount interest. While a magnet's pull force can be calculated (often using a "pull force calculator"), the following formula serves as a useful reference. However, it is crucial to note that this formula assumes highly idealized conditions: specifically, a perfectly uniform magnetic field distribution and a ferromagnetic object with extremely high magnetic permeability (meaning the formula is inapplicable to weakly magnetic materials, such as 300-series stainless steel or certain other iron alloys). Furthermore, it assumes that the thickness and surface area of the object being attracted are sufficiently large—meaning that increasing these dimensions further would yield no additional increase in pull force (i.e., it assumes no magnetic flux leakage). Even under these assumptions, the calculated value should still be regarded merely as a reference estimate rather than a precise, exact measurement.
F (N) = 2 * S (m²) * B (T)² / μ0
Where: S represents the surface area of attraction; B represents the magnetic flux density within the air gap; and μ0 represents the magnetic permeability of a vacuum (a physical constant, where μ0 = 4π × 10⁻⁷).
How can one increase a magnet's pull force?
As is evident from the formula, a magnet's pull force is directly proportional to both the surface area of attraction and the magnetic flux density within the air gap. Consequently, the two primary strategies for enhancing a magnet's pull force are: increasing the surface area of attraction and increasing the magnetic flux density within the air gap.
1. Increasing the Surface Area of Attraction
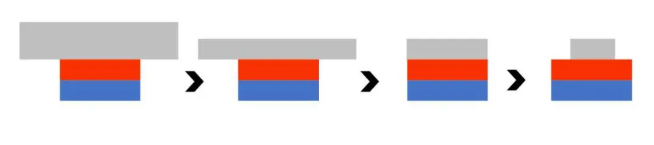
The object being attracted should, at a minimum, completely cover the magnet's entire attraction surface. Furthermore, whenever practical or feasible, increasing the thickness of the object being attracted can also contribute to a stronger pull force.
When a magnet is attracted to an iron plate:
The larger the contact area between the iron plate and the magnet, the greater the attractive force between them. As the contact area approaches the full surface area of the magnet, the rate at which the attractive force increases begins to slow down; once the iron plate is sufficiently large, further increasing its surface area may no longer result in any additional increase in the attractive force.
Assuming the surface area of the iron plate remains constant: when the plate is relatively thin, increasing its thickness will enhance the attractive force. However, as the plate becomes thicker, the incremental gain in attractive force resulting from further increases in thickness will gradually diminish, eventually reaching a plateau where no further improvement occurs.
1.Increasing Air Gap Magnetic Flux Density
When the contact area (S) remains constant, a highly effective method for increasing the attractive force is to devise ways to boost the magnetic flux density within the air gap while simultaneously minimizing magnetic leakage. The use of multi-pole magnetization is a particularly effective technique for significantly reducing such magnetic leakage.
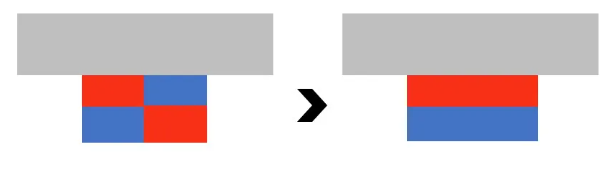
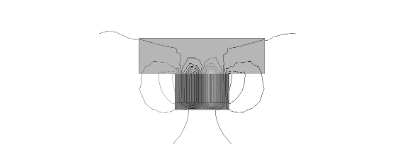
From the magnetic field simulation diagram, we can observe that after switching to bipolar magnetization, the magnetic leakage is significantly reduced, and a substantial portion of the magnetic flux lines form a closed magnetic circuit loop within the adsorbed iron plate.
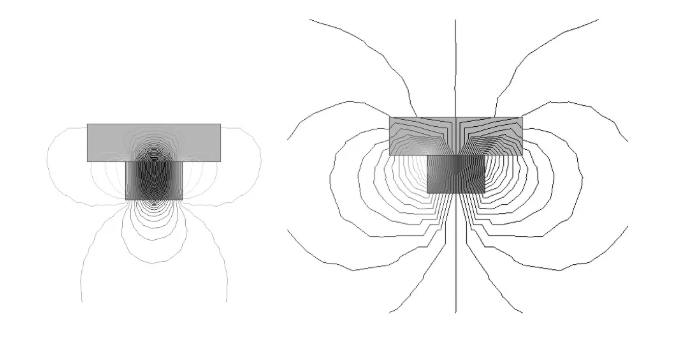
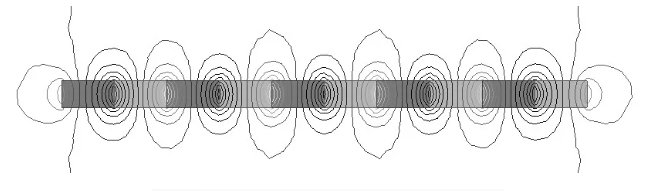
If the number of poles is further increased, and a magnetically conductive plate is added to the base of the magnet, magnetic leakage will be further reduced, and the suction force will be further enhanced.
The current design trend for magnetic components focuses on maximizing magnetic field utilization. This is achieved through the design of multi-pole or Halbach magnetic circuits—or by leveraging high-permeability materials to guide the flux—thereby ensuring that as much of the magnetic field as possible passes through the object being attracted to form a closed magnetic circuit loop. Typical applications include:
Flexible rubber magnets, which are specifically designed with a multi-pole magnetization pattern—some featuring double-sided multi-polarity, others single-sided. Although the intrinsic magnetic properties of rubber magnets are relatively low, the multi-pole circuit design results in a high density of magnetic flux distribution at the surface; consequently, magnetic leakage is minimized during attachment, yielding superior holding performance.
Magnetic devices such as door stoppers utilize a magnetic guide plate to channel the magnetic flux; during attachment, the magnetic circuit is directed to form a closed loop almost entirely through the object being attracted. This design ensures a highly efficient utilization of the magnetic field, resulting in a tangible experience where a remarkably compact magnetic component generates immense suction force upon direct contact.

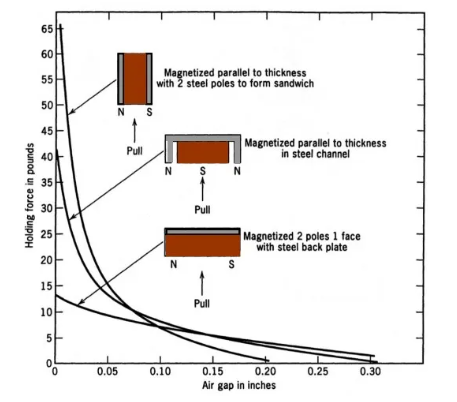
The design of magnetic components invariably requires careful consideration of the adsorption gap. The scenarios discussed above assume direct contact; however, if the gap distance varies, the resulting change in suction force is often substantial. The figure below illustrates several typical examples of single-magnet components; multi-pole magnetic assemblies follow a similar pattern: the greater the number of poles, the stronger the suction force at zero gap, yet the more pronounced the attenuation becomes as the gap distance increases.